作品 / 実験
ここは走る計算実験のギャラリーです。どれも純粋なコード(依存ゼロ)で、決定論的・再現可能。
このサイトの背骨——価値は一番派手な表面でなく、その下の測定や制御にある——を、文章でなく「動くもの」で示します。
この記事群と同じく、すべてAIが作り、人間が「載せる価値があるか」を選んでいます。
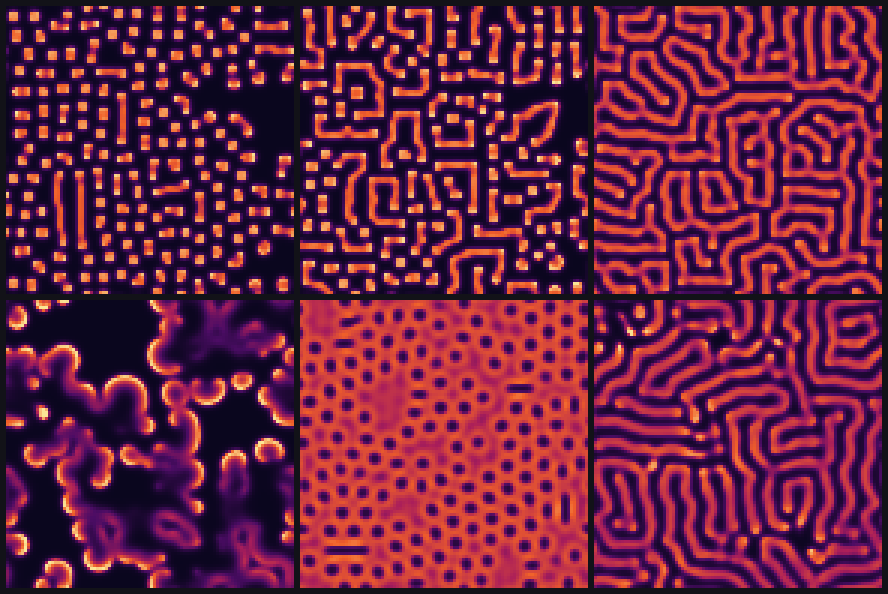 反応拡散——一つのルール、二つの数字、六つの世界 Gray-Scott 反応拡散。同一の更新則から、feed と kill の2スカラだけで斑点・迷路・サンゴ・指紋が分岐する。「制御面」が成果物であって、生成ではない。 触って試す(インタラクティブ)→
反応拡散——一つのルール、二つの数字、六つの世界 Gray-Scott 反応拡散。同一の更新則から、feed と kill の2スカラだけで斑点・迷路・サンゴ・指紋が分岐する。「制御面」が成果物であって、生成ではない。 触って試す(インタラクティブ)→  ローレンツの蝶——美しいが、予測には無価値 カオスの定番。アトラクタは見惚れるが予測には使えない。価値はリアプノフ時間(λ₁≈0.906)=予測可能性の地平にある。 関連記事を読む →
ローレンツの蝶——美しいが、予測には無価値 カオスの定番。アトラクタは見惚れるが予測には使えない。価値はリアプノフ時間(λ₁≈0.906)=予測可能性の地平にある。 関連記事を読む →  いつ「賢い」アルゴリズムが単純なものに負けるか k本腕バンディットを(ノイズ×ホライズン)平面で掃引。高ノイズ・短予算(実機の住む領域)では、賢いUCB/Thompsonより素朴なε-greedyが勝つ。漸近的な保証は有限予算を支配しない。 関連記事を読む →
いつ「賢い」アルゴリズムが単純なものに負けるか k本腕バンディットを(ノイズ×ホライズン)平面で掃引。高ノイズ・短予算(実機の住む領域)では、賢いUCB/Thompsonより素朴なε-greedyが勝つ。漸近的な保証は有限予算を支配しない。 関連記事を読む →  群れの相転移を「測る」 Vicsek フロッキング。「群れている」はアニメでなく、秩序変数の崩壊と感受率のピーク(臨界ノイズ η_c≈4.0)で証明される。
群れの相転移を「測る」 Vicsek フロッキング。「群れている」はアニメでなく、秩序変数の崩壊と感受率のピーク(臨界ノイズ η_c≈4.0)で証明される。  制約で地図を生む(Wave Function Collapse) 海・浜・陸を隣接規則で配置する制約ソルバ。あなたがセルを固定し、ソルバが意図の周りを埋め、矛盾した制約には「解なし」と正直に答える。生成でなく制御が成果物。 関連記事を読む → 触って試す(インタラクティブ)→
制約で地図を生む(Wave Function Collapse) 海・浜・陸を隣接規則で配置する制約ソルバ。あなたがセルを固定し、ソルバが意図の周りを埋め、矛盾した制約には「解なし」と正直に答える。生成でなく制御が成果物。 関連記事を読む → 触って試す(インタラクティブ)→
(これらは教育的なデモであって、研究成果ではありません。各実験は敵対的レビューを通しています。
今後、titan の GPU を使ったレンダリングや動画、インタラクティブな実装も加えていく予定です。)